This is an example of a writing robot
Handwriting is quite a difficult task for robots, but children find the result interesting.
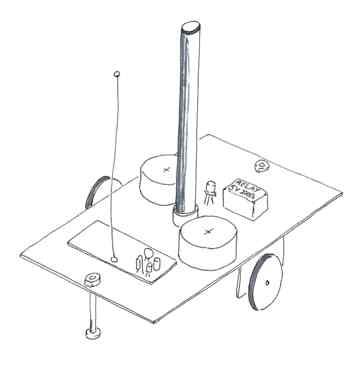
This is a robot which carries a paper disc. The program is written round the edge of the disc with a black felt-tip, like a bar code.
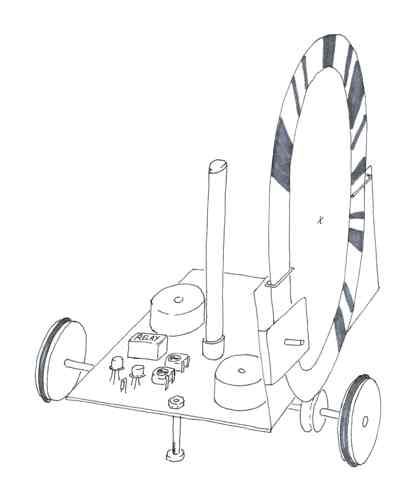
The disc is carried by the robot rather like music on a music stand, it bears on one of the robot's axles,which rotates it so that the code passes in front of a simple light pen. This works a relay which reverses the motor driving the other axle. A felt-tip is carried in the middle which traces out a simple pattern according to the program. A disc about 3 inches diameter is big enough, the novelty of writing the programs soon wears off.

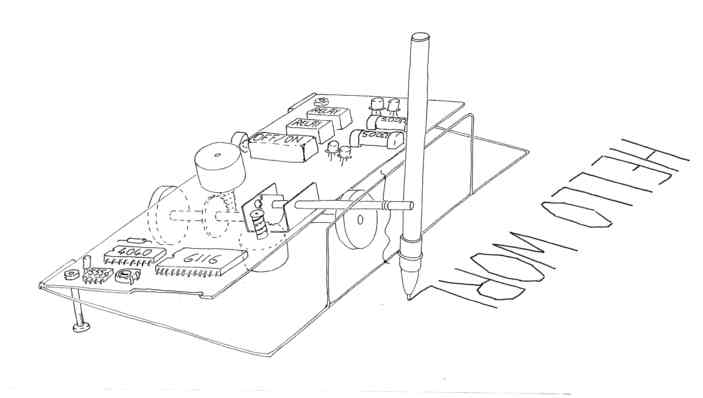
This next one is similar, but uses an electronic memory to store the program which it scans by rotating once on the paper disc, there is a downwards-pointing light pen at the end.
A read/write switch is then pressed and a felt-tip placed in the pen holder situated between the two axles, the robot then draws in accordance with the program it remembered from the paper disc. As with the previous robot only one of the motors reverses. The circuit shown is very laborious to build, this would all be done with a microcontroller nowadays, however it very effectively demonstrates how a computer works. Because it is so crude it suggests metaphorical improvements: what about two channels on the disc not just one? Then both motors could be reversed independently. If two channels why not eight? Then six of the eight could be used to define a time interval with a resolution of sixty-fourths. But how could that time interval be implemented? What about a second, independently driven paper disc to be used purely as a timer? It could have sixty-four segments carrying a sequence of six-bit binary numbers. But then how could that number be compared to the number on the program wheel? Assuming that problem could somehow be solved a means would be required to stop the drive motors when the prescribed time interval was reached. Then the counter wheel would complete its revolution, move the program wheel round one space and re-start the drive motors............
So you can gradually build up the architecture of a true computer without ever departing from the practicalities of improving the handwriting robot. I'm not suggesting that any of this should be implemented, it is a thought-experiment to approach an otherwise very difficult abstraction.

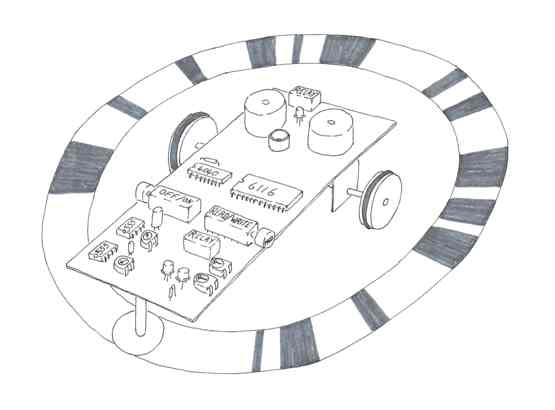
This one is similar to the previous one but it uses the scanned code to switch a single-channel radio transmitter taken from a cheap radio-controlled car. It doesn't have a pen holder and has only one wheel as it only goes in circles. The third balance-point is provided by the light pen.

The signal can be received by a simple morse-code writer
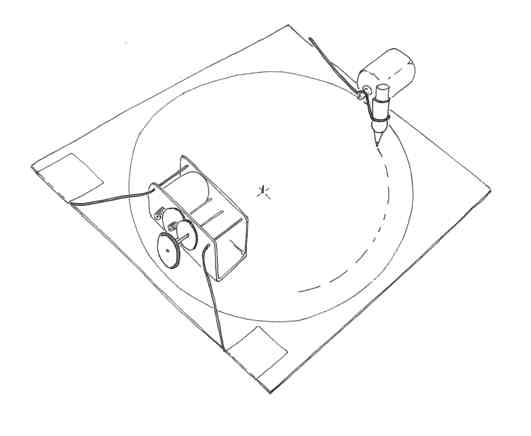
or by a robot similar to the first two but worked by a radio receiver. This can be then developed by switching the transmitter with a computer printer-port rather than with a paper disc.
The more slowly robots move, the more consistant they are however they become boring to watch.
All of the above were made using either walkman motors or Mabuchi solar motors; the Mabuchi motors are very good, almost as consistant as stepper motors and much simpler to use. If they are driven from a single AA battery the effect of voltage fluctuation is minimised. Best results are obtained using a single worm gear.
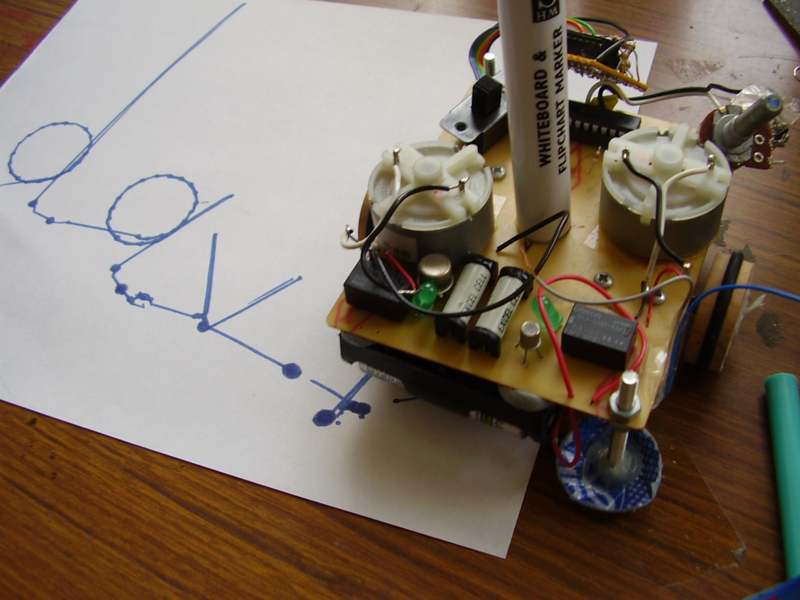
This uses two mabuchi solar motors, I had to re-align it after each letter. It's being controlled by a PIC microcontroller; the loose leads are for alternative connection to a PC.
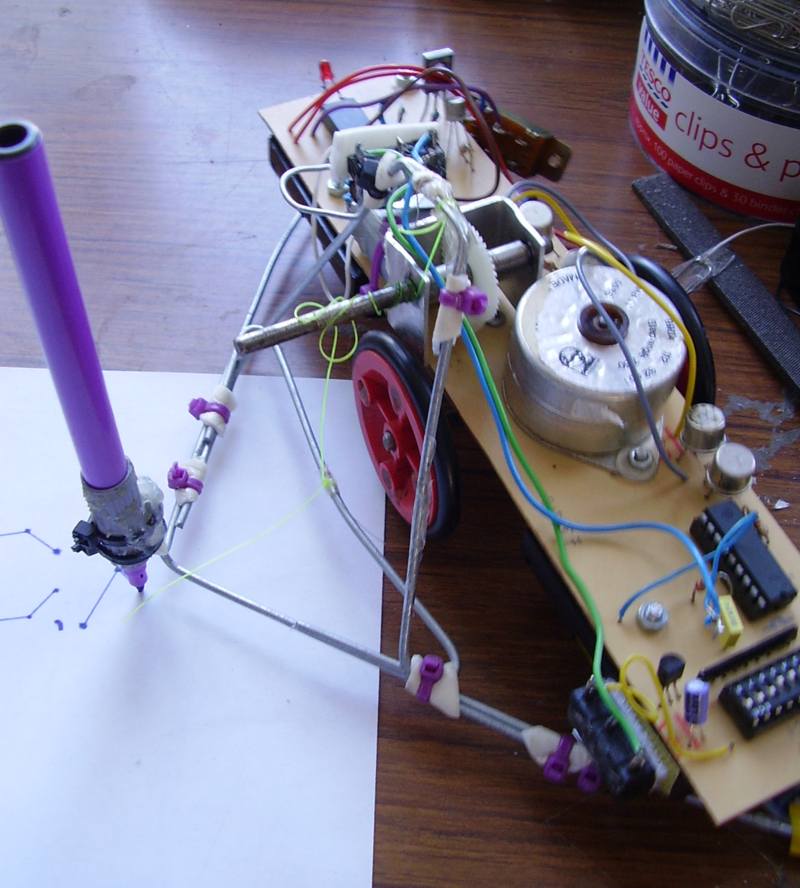
Finally a robot which uses two channel control to steer left/right or forward/reverse and raise or lower its pen.
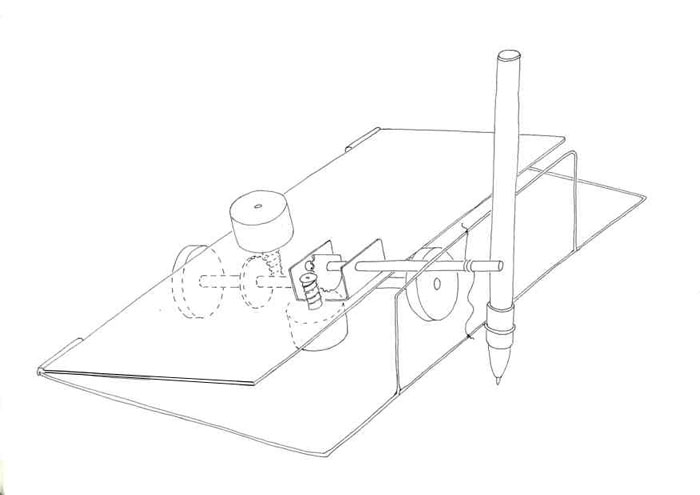
It does this by using the pen to jack up one wheel, whereupon the robot circles round the pen tip which acts like the point of a pair of compasses.
The pen is mounted on a wishbone which can be raised to a neutral position so that the pen can write, both the robot's wheels now being on the ground. If it is raised further the pen lifts off the paper. Although this arrangement seems a bit complicated it overcomes various problems: the robot draws very straight lines and the pen stays central when the robot is changing direction. It also permits lifting the pen, this is useful if you want the robot to write upper-case.
Although these robots can do quite legible handwriting using dead-reckoning it is advisable to fit them with an electronic compass. This does away with all the design problems and raises the speed limit so the extra expense is well worth it.
Youtube
robot that remembers where you pushed it & replicates the movement
Perhaps a better use for electronic light pens which can read felt-tip lines on paper is for line-following robots
given a good transducer design these work very well. If they can steer round a right-angle they can navigate using a grid. Another potential use of this type of circuit is for a paper wheel distance-measurer.
Youtube
another one on Youtube
maze solving robot
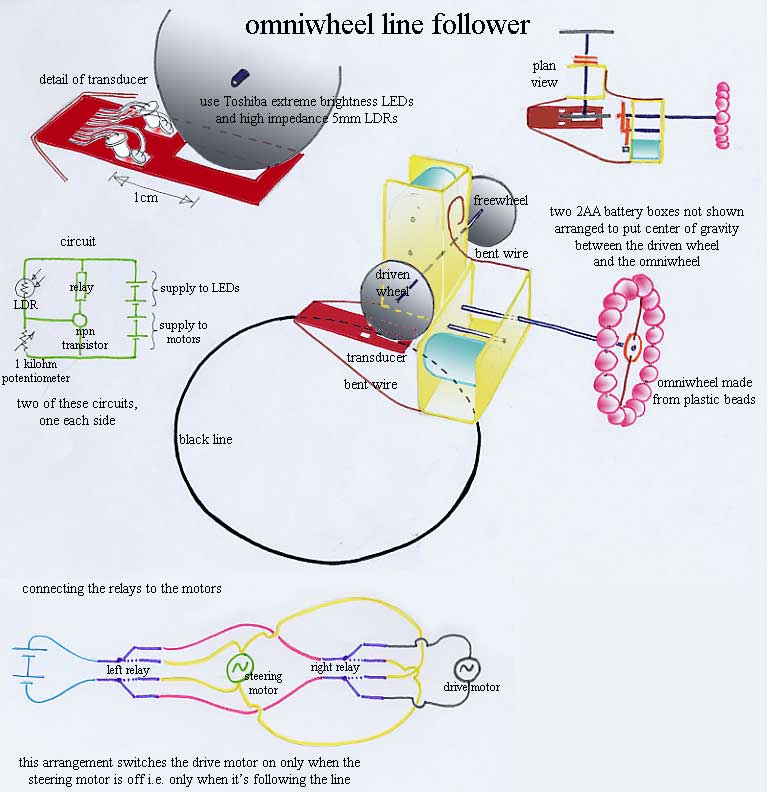
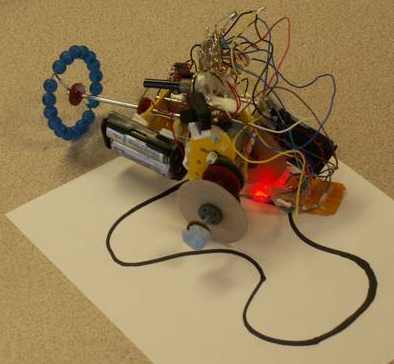
following bendy drinking straws
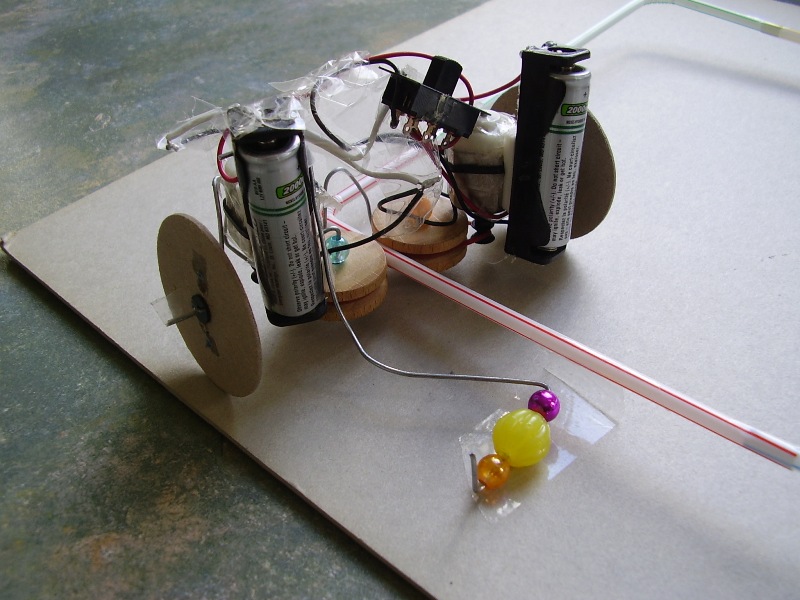
Bendy drinking straws can be used to make a railway track, a robot that follows the track can be made using two wooden pulley wheels, each one driven by a seperate electric motor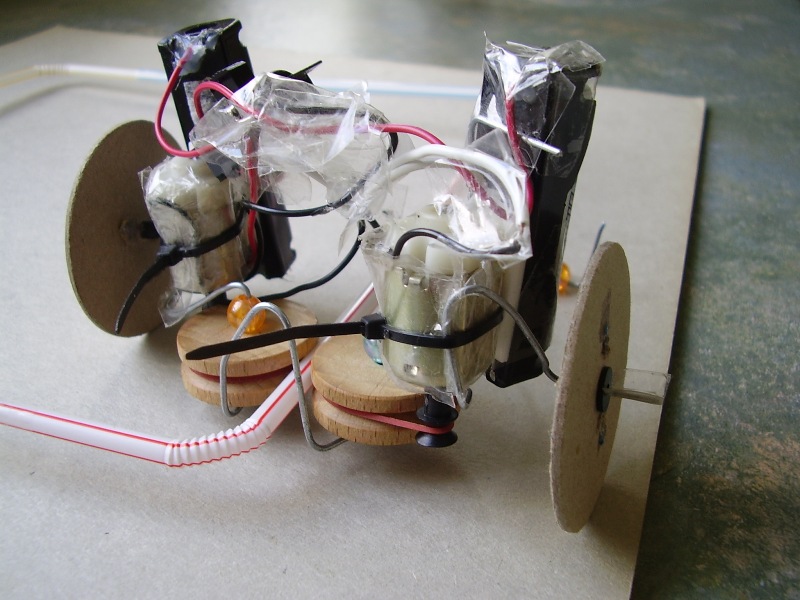
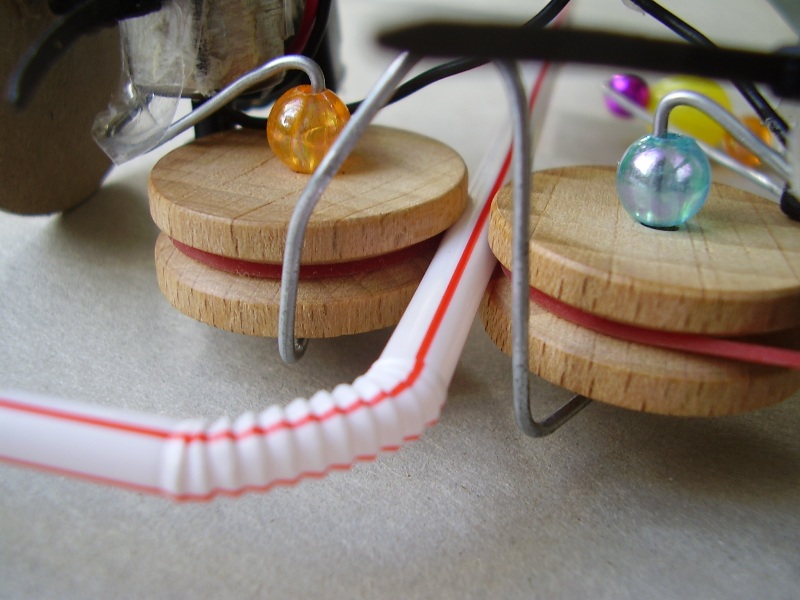
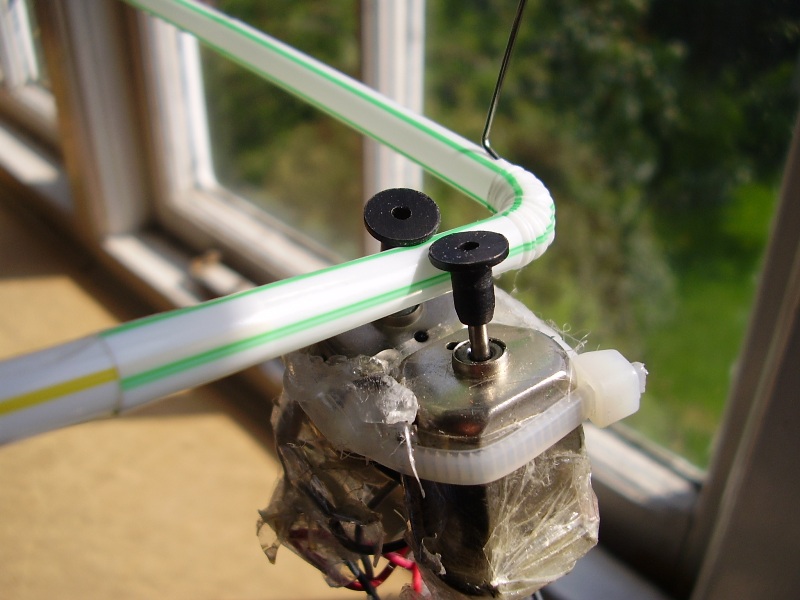
This is a detail of the pulleys, they are sprung against each other by a loop of wire, this ensures that they always squeeze the straw
The bendy straws are loosely attached to the base by bits of sellotape positioned in the middle of the straight bits of straw. The arm with the plastic beads on the end is to stop it toppling over. In this version the two batteries are connected in series and the motors are connected in parallel. So each motor gets three volts.
Movie
Another movie
I eventually discovered that you can suspend the robot underneath the straws, just running on the plastic bushes
you can suspend the straws by paperclips with a half-inch right angle bent at the end and pushed through a pinhole in the top of the straw. You need to bend the hooks in a curve to support corners which otherwise tend to jam.
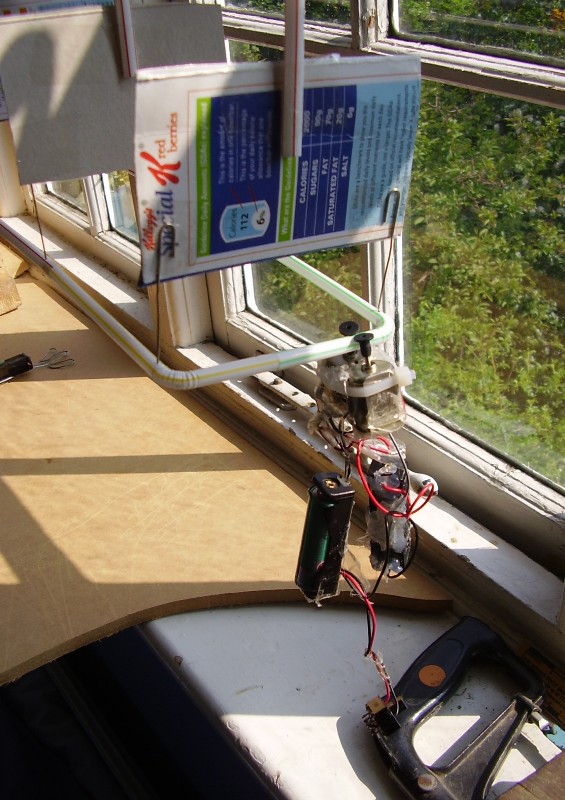
The hooks should be attached to some kind of rigid structure which is in turn hung from a bit of string stretched across a room. This makes them more stable

In this case I have suspended the hooks in pairs to give the simplest possible track layout, but with multiple bits of string much more elaborate arrangements should be possible. If something is pushed inside the straight runs of straw to make them a bit stronger eg bits of split bamboo window-blind, garden wire (spaghetti?) etc fewer suspension hooks are needed. I found the straws by themselves are only just strong enough to support the robot with two AA batteries, if you wanted to make it faster with more batteries the track would need to be strengthened.
Movie
Another movie
Read about the Brennan gyro-monorail; not as silly as you might think
Maglev train explained
this is a more recent version

movie on youtube
This is a good thing to start electronics with
Perhaps a good thing to end electronics with, too.
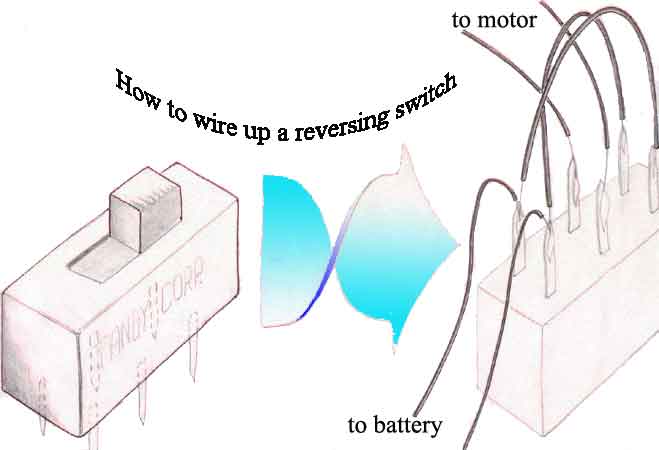
This is a way of making a reversing switch contributed by Richard Harris
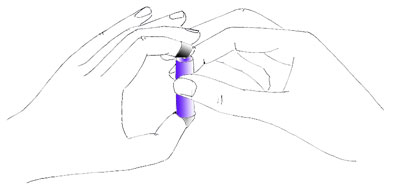
Another way of doing this is to make two rings out of cooking foil: one for your left-hand thumb and one for your left-hand index finger (assuming you're right-handed); fix a wire to each ring using a paper clip; now if you hold an AA battery between your right hand thumb and forefinger you can use the rings to touch the battery terminals. To change the polarity just turn the battery round.
This is an extension of the same idea: a robot usually has a minimum of two motors both of which need to be reversible, this can be done with a slightly more complicated arrangemant of rings and paperclips
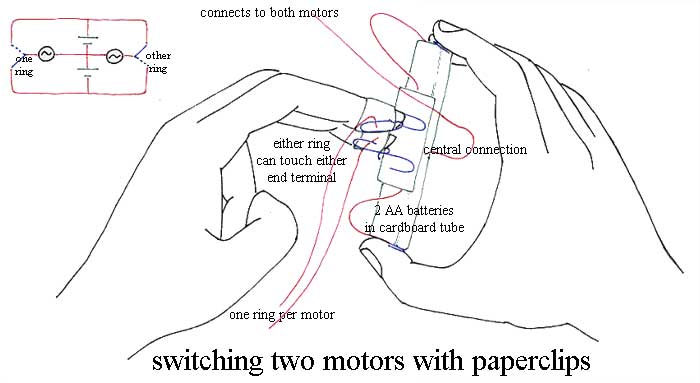
Because of the finger tips' sensitivity, it is possible to touch either or both of the rings on either or both of the clips on the side of the cardboard tube. Squeezing the batteries in the tube insures good connections in the middle and at either end.
Another approach is to make a joystick out of microswitches
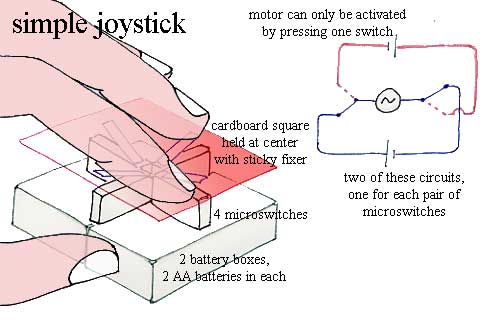
this is simple to make and very satisfying to use, but microswitches are quite expensive. It can be used with bigger batteries but then the circuits must be fused.
This is a way of making a writing robot just using scissors and sticky-fixers
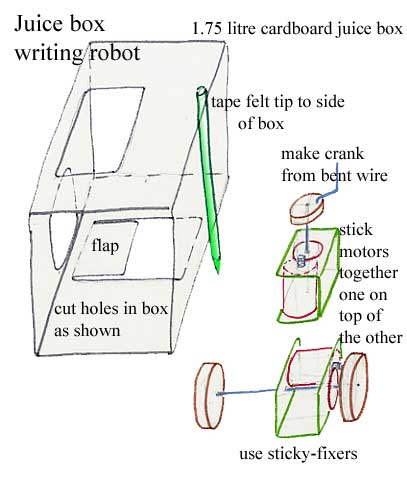
the crank pushes on one side or the other of the hole at the top of the box and the box will tip one way or the other accordingly. As shown the robot is jacked up on the pen tip which acts as a pivot around which the robot travels, because one wheel has been pushed off the paper. If the box tips the other way it lifts the pen off the paper. If the crank is central the pen draws a straight line.
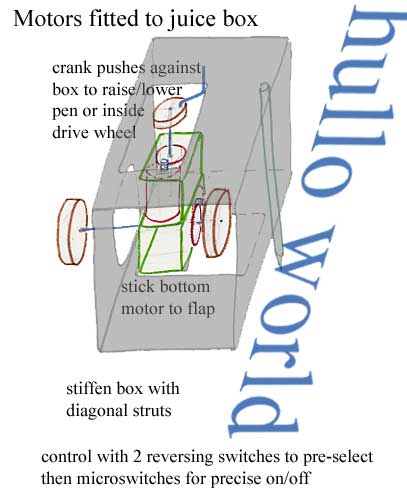
It can be controlled with two reversing switches (as above). If micro-switches are connected in series with the reversing switches it gives very good control.
This is a similar design made with a coke can

It is being controlled from the printer port of a PC via a very simple interface using QBASIC. It uses two high-impedance motors and a single AA battery: it has an electronic compass mounted on the drinking-straw structure above it.
This is a stand-alone version using a PIC microcontroller. It uses a stepper-motor rather than a compass. The fishing line on the winch mechanism looks tangled but isn't, it just has slack in it to allow the wishbone to float when it's drawing a line.
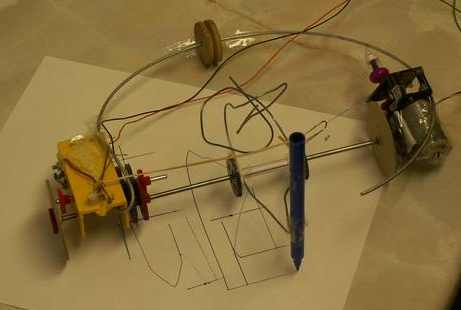
This is a better way of doing it
link to 2 meg movie of above
It uses two motor-gearboxes costing about �1-80 each, two cardboard wheels, a bit of 3mm steel rod (or bamboo if steel unavailable), some bent wire, a rubber band, a short length of cotton
link to 2 meg movie of drawing squares
the squares are made of diagonal lines (both motors running at once)
The thing about writing control programs is you need something interesting to control
link to 3 meg movie of first two letters of PROGRESS
This one doesn't use a slider. Sliders tend to stick

It uses a long pen arm which pivots laterally at the opposite end from the pen. So although the lines are slightly curved they aren't curved enough to matter, and the greater simplicity makes this compromise worth while.

It is very similar to a harmonograph arm in that it pivots on two contact points (the wheels), which also give it left-right motion. The third contact point is the pen tip. The cotton winding & unwinding gives it up-down motion. It is very reliable & simple to make.
read about PICs on wikipedia
cheap purpose-built controller
good PIC site
controlling a pantograph with a lobed cardboard disc
artist automaton made from card
This is a simple light-seeking robot, it moves either in a straight line or round & round on the spot
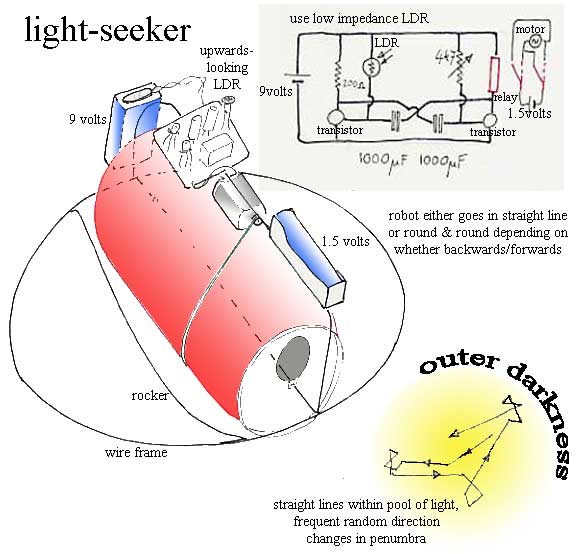
This animation demonstrates the mechanical principal of the rocker

It is controlled by a simple circuit called a multivibrator which reverses the motor roughly every half second: as the robot enters an area of semi-darkness the round & round half of the cycle becomes more emphasised; as it enters a lighter area it travels in longer straight lines.
Tom Jenner's version
similar thing but solar powered
movie of one that works with a bit of string
plotting patterns on eggs
Jaquet-Droz automata
Jaquet-Droz automaton on youtube
B.F.Skinner
shimmibot
hotwiring an inkjet cartridge for handheld use
instructables version
lego mindstorms robot does portraits
UAV skywriting
spraybot
graffitibot
printbrush
hi-tech drawing machine
lots of spray cans
writing with water drops
your name in CHINESE
lightpoem
styrofoam-cutting robot
DIY telepresence robot
using wall/floor as projector screen
cinemin VDU
irobot telepresence robot
good site for motors, gears etc
my email is davidvwilliamson@hotmail.com
back to main site
web page that automatically does ascii art it's a bit tricky to use..................
Make a picture (eg with 'paint') save the picture somewhere on your computer, tell the web page where to find the picture (ie what folder is it in) and what the picture's called
tell it to use small characters & 80 character width
now click 'send', when it does the ascii art highlight the text with the cursor then go Ctrl C (to put it on the clipboard) now paste it into 'word' with the font set as 'Courier New'
now highlight the text with the cursor again, copy it onto the clipboard again and it should paste into emails ok. I don't know if it will work with text messaging, it might be worth a try
